作用
并查集可以快速度的解决连接问题,比如 A 和 B 是否相连。比如下图:
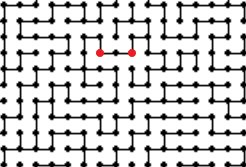
问红色的两个点是否相连,毫无疑问,一眼就看出来,是相连的。
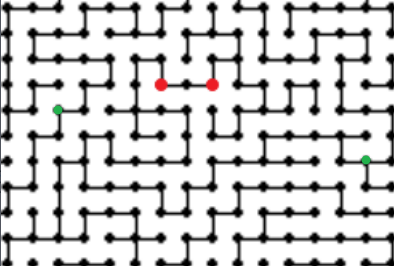
问绿色的两个点是否相连,可能就需要看一会了,才能观察出来是否相连,如果更多,那可能就无法观察出来了,所以就引出了并查集这种数据结构。
同时,他也可以用在人与人关系中,比如社交网络,每个人就相当于一个点。计算机网络,每台计算机点等等。
并查集可以解决两点是否连接的问题,但是无法提供详细的连接路径。相当于只关心两者是否认识,而不关心两者是通过介绍认识或者通过网络认识等等。有失就有得,既然不用关心中间的路径,那相对来说此数据结构的效率就会更高。
并查集这种数据结构操作并不复杂,一般包括两种操作:
- Find:查找一个点属于哪个组
- Union:把两个点合并到一个组中
结构
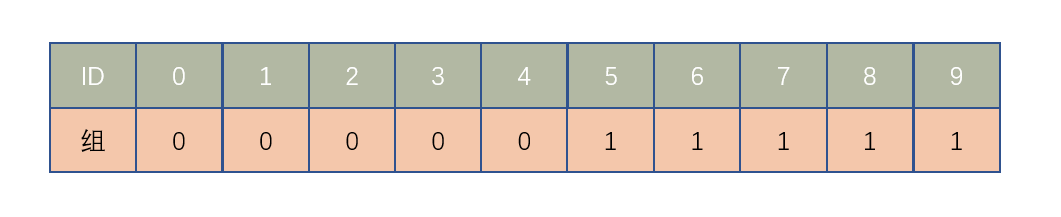
上图可以表示为 0、1、2、3、4 都属于组 0,5、6、7、8、9 都属于 组 1,也可以说他们相连。当然,也可以把 0、2、4、6、8 这些偶数划分到一组里,这就看具体业务了。通过图上的结构也可看出,在一般的简单实现中可以采用数组的方式进行表示。
Quick Find
快速查询的方式特点是简单、便于理解、查询速度很快,可以达到 O(1) 级别,但是合并的速度慢。
实现
#include <iostream>
#include <cassert>
class QuickFind {
private:
int *id;
int count;
public:
QuickFind(int n) {
count = n;
// 开辟对应数量的空间
id = new int[n];
// 初始化的时候,两两之间都不是一个组(不相连),所以给个默认值
for (int i = 0; i < n; ++i) {
id[i] = i;
}
}
~QuickFind() {
delete[] id;
}
/**
* 查找相应元素对应的组
*
* 时间复杂度:O(1)
*
* @param p 查找元素
* @return 所在组
*/
int find(int p) {
assert(p >= 0 && p < count);
return id[p];
}
/**
* 判断两个元素是否在一个组(相连)
*/
bool isConnected(int p, int q) {
return find(p) == find(q);
}
/**
* 把元素 p 所在分组的所有元素都合并到元素 q 所在分组
*
* 时间复杂度:O(n)
*
* @param p
* @param q
*/
void unionElements(int p, int q) {
int pGroup = find(p);
int qGroup = find(q);
if (pGroup == qGroup) {
// 本身就是一组的,返回就行
return;
}
// 找到所有原来属于 pGroup 的元素,都更改成 qGroup
for (int i = 0; i < count; ++i) {
if (pGroup == id[i]) {
id[i] = qGroup;
}
}
}
};测试效率
随机测试方法,指定 n 个元素,先对 n 个元素进行随机合并分组操作,再随机抽取 n 各元素判断是否相连。
void testQF(int n) {
srand(time(NULL));
QuickFind uf = QuickFind(n);
time_t startTime = clock();
// 进行 n 次操作, 每次随机选择两个元素进行合并操作
for (int i = 0; i < n; i++) {
int a = rand() % n;
int b = rand() % n;
uf.unionElements(a, b);
}
// 再进行n次操作, 每次随机选择两个元素, 查询他们是否同属一个集合
for (int i = 0; i < n; i++) {
int a = rand() % n;
int b = rand() % n;
uf.isConnected(a, b);
}
time_t endTime = clock();
// 打印输出对这2n个操作的耗时
std::cout << "QF 2n: " << 2 * n << " ops: " << double(endTime - startTime) / CLOCKS_PER_SEC << "s" << std::endl;
}
int main() {
std::cout << "QuickFind START" << std::endl;
std::cout << "QuickFind 10000: ";
testQF(10000);
std::cout << "QuickFind 100000: ";
testQF(100000);
std::cout << "QuickFind 1000000: ";
testQF(1000000);
std::cout << "QuickFind END" << std::endl;
return 0;
}结果:
QuickFind START
QuickFind 10000: QF 2n: 20000 ops: 0.091s
QuickFind 100000: QF 2n: 200000 ops: 3.524s
QuickFind 1000000: QF 2n: 2000000 ops: 33.375s
QuickFind END当数据量达到 10W 时,已经需要耗费 3.524 秒了,这个效率已经有点不太理想了,可以分析下性能耗费在哪里。isConnected 里面调用的是 find,find 的时间复杂度为 O(1),不存在性能问题。再看 unionElements,测试方法里面循环了一个 n。
for (int i = 0; i < n; i++) {
int a = rand() % n;
int b = rand() % n;
uf.unionElements(a, b);
}而 unionElements 方法本身就是 O(n) 的时间复杂度,那综合来看就是 O(n^2) 的时间复杂度,性能消耗就在此处。
Quick Union
说明
为了解决合并时间复杂度过高的问题,就引出了 Quick Union 的概念。
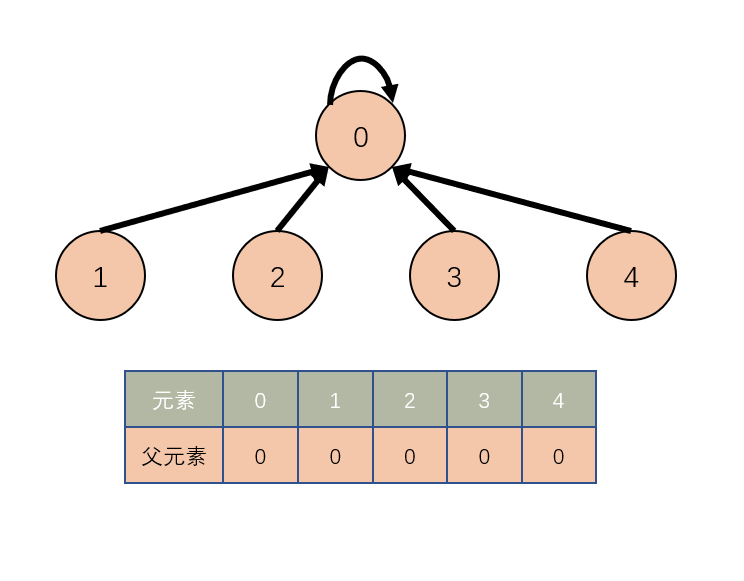
每个元素都指向一个父元素,父元素再指向父元素的父元素,依次向上,最顶部的元素就没有父元素了,那么指向其自身,那最顶部的元素就是所属的组,这样就形成了一个树结构。
假设有 7、5、1 三个元素,初始情况父元素都是指向自己,先把 1 合并到 5,再把 5 合并到 7。

假设现在有一个新的元素 2 要合并到已存在 1 或者 5 或者 7 上,那么就需要把 2 的父元素指向 1 或者 5 或者 7 的根元素,1、5、7 的根元素都是 7,也就是最终 2 的父元素指向了 7。

假设有一个已存在的元素节点树,其根节点为 6,要合并到 1 上,最终会指向到 1 的根节点 7。
假设是让 3 合并到 1,最终结果也是一样的,也是 6 的父节点指向 7。
总结来说就是,把 A 节点合并到 B 节点,需要把 A 根节点的父元素指向 B 的根节点。一个比较完整的动画演示:
Quick Union 的实现如果想要判断两个点是否相连,就没有 Quick Find 那么方便,需要判断两点的根节点是否是同一个。而让两点相连就会快速很多,不用每次都要遍历整个 n。
上图中,Union 7 To 3 这一步,也可以做成把 5 的父元素节点设置成 3,那为什么要指向 4 呢,假设指向了 3,那这种逻辑下势必会让整个树层级快速的变高,而判断两点是否相连是需要查找两点的根节点是否相同,树的层级越高,相对来说找到根节点肯定就越慢,这里直接指向 4 算是一个小优化。
实现
#include <iostream>
#include <cassert>
class QuickUnion {
private:
int *parent;
int count;
public:
QuickUnion(int n) {
count = n;
// 开辟对应数量的空间
parent = new int[n];
// 初始化的时候,两两之间都不是一个组(不相连),所以给个默认值
for (int i = 0; i < n; ++i) {
parent[i] = i;
}
}
~QuickUnion() {
delete[] parent;
}
/**
* 查找相应元素对应的组
*
* 时间复杂度:O(h),h 为树的高度
*
* @param p 查找元素
* @return 所在组
*/
int find(int p) {
assert(p >= 0 && p < count);
while (p != parent[p]) {
p = parent[p];
}
return p;
}
/**
* 判断两个元素是否在一个组(相连)
*
* 时间复杂度:O(h),h 为树的高度
*/
bool isConnected(int p, int q) {
return find(p) == find(q);
}
/**
* 把元素 p 所在分组的所有元素都合并到元素 q 所在分组
*
* 时间复杂度:O(h),h 为树的高度
*
* @param p
* @param q
*/
void unionElements(int p, int q) {
int pRoot = find(p);
int qRoot = find(q);
if (pRoot == qRoot) {
// 本身就是一组的,返回就行
return;
}
// 直接把 p 的根元素节点的父元素指向 q 根元素节点即可
parent[pRoot] = qRoot;
}
};测试效率
void testQU(int n) {
srand(time(NULL));
QuickUnion qu = QuickUnion(n);
time_t startTime = clock();
// 进行 n 次操作, 每次随机选择两个元素进行合并操作
for (int i = 0; i < n; i++) {
int a = rand() % n;
int b = rand() % n;
qu.unionElements(a, b);
}
// 再进行n次操作, 每次随机选择两个元素, 查询他们是否同属一个集合
for (int i = 0; i < n; i++) {
int a = rand() % n;
int b = rand() % n;
qu.isConnected(a, b);
}
time_t endTime = clock();
// 打印输出对这2n个操作的耗时
std::cout << "QU 2n: " << 2 * n << " ops: " << double(endTime - startTime) / CLOCKS_PER_SEC << "s" << std::endl;
}
int main() {
std::cout << "QuickUnion START" << std::endl;
std::cout << "QuickUnion 10000: ";
testQU(10000);
std::cout << "QuickUnion 100000: ";
testQU(100000);
std::cout << "QuickUnion 1000000: ";
testQU(1000000);
std::cout << "QuickUnion END" << std::endl;
return 0;
}结果:
QuickUnion START
QuickUnion 10000: QU 2n: 20000 ops: 0.032s
QuickUnion 100000: QU 2n: 200000 ops: 4.067s
QuickUnion 1000000: QU 2n: 2000000 ops: 51.655s
QuickUnion END通过与上边的 Quick Find 对比发现,慢的不是一点半点。原因分析如下表:
| 时间复杂度统计 | Quick Find | Quick Union |
|---|---|---|
| find | O(1) | O(h, h 为树的高度) |
| isConnected | O(1) | O(h) |
| unionElements | O(n) | o(h) |
总的来看,当 h 的高度越高时,Quick Union 的时间消耗就会越多。
Size 优化
说明
已知的结果是 Quick Union 中 h 越高,时间消耗就越多,先观察下面的一个合并过程:
这和之前的逻辑没有什么区别,把元素 7 合并到元素 6,就找到 7 的根元素节点的父节点设置成 6 的根元素节点即可。这样的结果就是树的高度变高了,而树的高度越高,Quick Union 的效率就越低。可以增加一个 Size,其作用就是在合并时,把树高度比较低的合并到树高度比较高的上,比如下:
经过这么一调整,树的高度没有变高,这一改动会更好的控制树的高度,使后续的 find 等操作更快一点。
实现
#include <iostream>
#include <cassert>
class QuickUnionSize {
private:
int *parent;
/**
* sz[i]: 表示以 i 为根的这棵树中有多少个元素。
*/
int *sz;
int count;
public:
QuickUnionSize(int n) {
count = n;
// 开辟对应数量的空间
parent = new int[n];
sz = new int[n];
// 初始化的时候,两两之间都不是一个组(不相连),所以给个默认值
for (int i = 0; i < n; ++i) {
parent[i] = i;
sz[i] = 1;
}
}
~QuickUnionSize() {
delete[] parent;
delete[] sz;
}
/**
* 查找相应元素对应的组
*
* 时间复杂度:O(h),h 为树的高度
*
* @param p 查找元素
* @return 所在组
*/
int find(int p) {
assert(p >= 0 && p < count);
while (p != parent[p]) {
p = parent[p];
}
return p;
}
/**
* 判断两个元素是否在一个组(相连)
*
* 时间复杂度:O(h),h 为树的高度
*/
bool isConnected(int p, int q) {
return find(p) == find(q);
}
/**
* 把元素 p 所在分组的所有元素都合并到元素 q 所在分组
*
* 时间复杂度:O(h),h 为树的高度
*
* @param p
* @param q
*/
void unionElements(int p, int q) {
int pRoot = find(p);
int qRoot = find(q);
if (pRoot == qRoot) {
// 本身就是一组的,返回就行
return;
}
if (sz[pRoot] < sz[qRoot]) {
// p 节点这个树的高度 小于 q 节点这个树
// 所以要把 pRoot 的父节点指向 qRoot,并且 qRoot 的 Size 要加上 pRoot 的 Size
parent[pRoot] = qRoot;
sz[qRoot] += sz[pRoot];
} else {
parent[qRoot] = pRoot;
sz[pRoot] += sz[qRoot];
}
}
};测试效率
void testQUS(int n) {
srand(time(NULL));
QuickUnionSize qus = QuickUnionSize(n);
time_t startTime = clock();
// 进行 n 次操作, 每次随机选择两个元素进行合并操作
for (int i = 0; i < n; i++) {
int a = rand() % n;
int b = rand() % n;
qus.unionElements(a, b);
}
// 再进行n次操作, 每次随机选择两个元素, 查询他们是否同属一个集合
for (int i = 0; i < n; i++) {
int a = rand() % n;
int b = rand() % n;
qus.isConnected(a, b);
}
time_t endTime = clock();
// 打印输出对这2n个操作的耗时
std::cout << "QUS 2n: " << 2 * n << " ops: " << double(endTime - startTime) / CLOCKS_PER_SEC << "s" << std::endl;
}
int main() {
std::cout << "QuickUnionSize START" << std::endl;
std::cout << "QuickUnionSize 10000: ";
testQUS(10000);
std::cout << "QuickUnionSize 100000: ";
testQUS(100000);
std::cout << "QuickUnionSize 1000000: ";
testQUS(1000000);
std::cout << "QuickUnionSize END" << std::endl;
return 0;
}结果:
QuickUnionSize START
QuickUnionSize 10000: QUS 2n: 20000 ops: 0s
QuickUnionSize 100000: QUS 2n: 200000 ops: 0.01s
QuickUnionSize 1000000: QUS 2n: 2000000 ops: 0.104s
QuickUnionSize END可以说是很喜人了。
注意:Size 代表的是一棵树存在多少个元素(一棵树的所有分支都计算在内),而不是代表其最大的 h。
Rank
说明
Size 的方式其实是一种不算公平的方式,看下图:
这是由于根元素节点 4 其 Size 大小为 5,而根元素节点 5,其 Size 大小为 3,数量少的合并到数量多的,所以就把 5 的父节点指向了 4。从图中也能看出来,以 4 为根节点的这棵树,高度最高也就 2,而以 5 为根节点的这棵树,高度最高是 3,而在 Quick Union 这种数据结构中,高度(h)肯定是越小越好。Rank 的作用就是用一棵树最高的层级作比较,而不是像 Size 那样,比较树中拥有的元素总数。
实现
#include <iostream>
#include <cassert>
class QuickUnionRank {
private:
int *parent;
/**
* rank[i]: 表示以 i 为根的这棵树中最大的 h。
*/
int *rank;
int count;
public:
QuickUnionRank(int n) {
count = n;
// 开辟对应数量的空间
parent = new int[n];
rank = new int[n];
// 初始化的时候,两两之间都不是一个组(不相连),所以给个默认值
for (int i = 0; i < n; ++i) {
parent[i] = i;
rank[i] = 1;
}
}
~QuickUnionRank() {
delete[] parent;
delete[] rank;
}
/**
* 查找相应元素对应的组
*
* 时间复杂度:O(h),h 为树的高度
*
* @param p 查找元素
* @return 所在组
*/
int find(int p) {
assert(p >= 0 && p < count);
while (p != parent[p]) {
p = parent[p];
}
return p;
}
/**
* 判断两个元素是否在一个组(相连)
*
* 时间复杂度:O(h),h 为树的高度
*/
bool isConnected(int p, int q) {
return find(p) == find(q);
}
/**
* 把元素 p 所在分组的所有元素都合并到元素 q 所在分组
*
* 时间复杂度:O(h),h 为树的高度
*
* @param p
* @param q
*/
void unionElements(int p, int q) {
int pRoot = find(p);
int qRoot = find(q);
if (pRoot == qRoot) {
// 本身就是一组的,返回就行
return;
}
if (rank[pRoot] < rank[qRoot]) {
// pRoot 小于 qRoot,那直接指向 qRoot 就行了,qRoot 的 h 也不需要增加
parent[pRoot] = qRoot;
} else if (rank[qRoot] < rank[pRoot]) {
// qRoot 小于 pRoot,那直接指向 pRoot 就行了,pRoot 的 h 也不需要增加
parent[qRoot] = pRoot;
} else {
// 此时两方都相等,那谁指向谁都无所谓,被指向的一方 +1 即可。
parent[pRoot] = qRoot;
rank[qRoot] += 1;
}
}
};测试效率
void testQUR(int n) {
srand(time(NULL));
QuickUnionRank qur = QuickUnionRank(n);
time_t startTime = clock();
// 进行 n 次操作, 每次随机选择两个元素进行合并操作
for (int i = 0; i < n; i++) {
int a = rand() % n;
int b = rand() % n;
qur.unionElements(a, b);
}
// 再进行n次操作, 每次随机选择两个元素, 查询他们是否同属一个集合
for (int i = 0; i < n; i++) {
int a = rand() % n;
int b = rand() % n;
qur.isConnected(a, b);
}
time_t endTime = clock();
// 打印输出对这2n个操作的耗时
std::cout << "QUR 2n: " << 2 * n << " ops: " << double(endTime - startTime) / CLOCKS_PER_SEC << "s" << std::endl;
}
int main() {
std::cout << "QuickUnionRank START" << std::endl;
std::cout << "QuickUnionRank 10000: ";
testQUR(10000);
std::cout << "QuickUnionRank 100000: ";
testQUR(100000);
std::cout << "QuickUnionRank 1000000: ";
testQUR(1000000);
std::cout << "QuickUnionRank END" << std::endl;
return 0;
}结果:
QuickUnionRank START
QuickUnionRank 10000: QUR 2n: 20000 ops: 0s
QuickUnionRank 100000: QUR 2n: 200000 ops: 0.01s
QuickUnionRank 1000000: QUR 2n: 2000000 ops: 0.101s
QuickUnionRank END注意:极少数情况下 Size 的算法可能会比 Rank 高,因为合并的过程中多判断了一次。Rank 的合并方式更加合理,所以普遍情况下还是效率更高。
Path Compression
说明
之前的 Size、Rank 都是在优化 union 操作,而路径压缩是在 find 阶段进行优化。假设有下面这么一棵树:
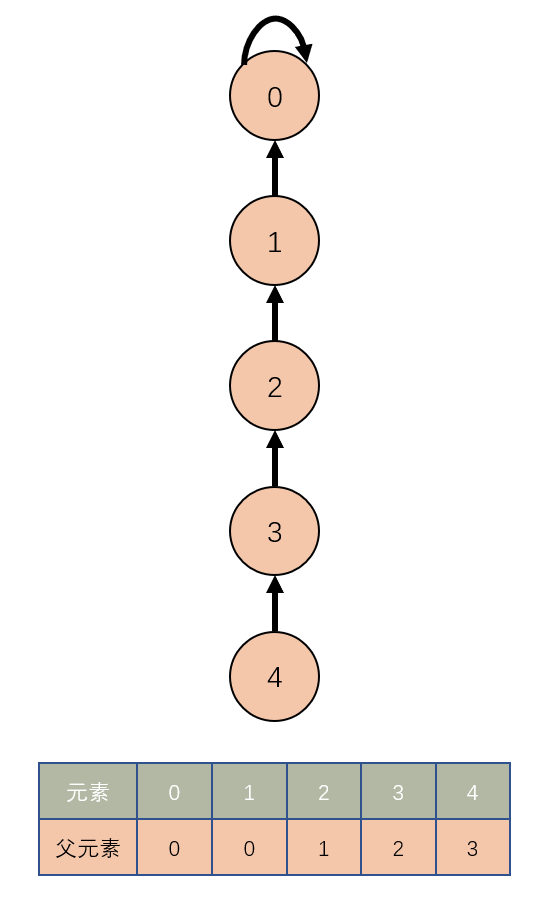
通过 find 方法查找 4 的根节点,毫无疑问,最终查找到了 0。可以拆解一下其步骤:
- 查找 4 的父节点是否与 4 相同。
- 不同,父节点是 3,继续查找 3。
- 查找 3 的父节点是否与 3 相同。
- 不同,父节点是 2,继续查找 2。
- 查找 2 的父节点是否与 2 相同。
- 不同,父节点是 1,继续查找 1。
- 查找 1 的父节点是否与 1 相同。
- 不同,父节点是 0,继续查找 0。
- 查找 0 的父节点是否与 0 相同。
- 相同,那根就是 0 。
经过一系列的循环查找,知道找到根节点,中间也没做其他操作,就是单纯的查找,其实可以多做一些压缩的操作,比如改成如下:
- 查找 4 的父节点是否与 4 相同。
- 不同,父节点是 3,把 4 的父节点修改成 3 的父节点 2。
- 查找 2 的父节点是否与 2 相同。
- 不同,父节点是 1,把 2 的父节点修改成 1 的父节点 0。
- 查找 0 的父节点是否与 0 相同。
- 相同,那根就是 0 。
动画演示如下:
好处有两点:
- 步骤变少了。
- 路径被压缩了,下次再查找更快了。
当压缩过程到达根时,可能会出现这种情况,父节点与自己不等,但是父节点已经是根节点了:
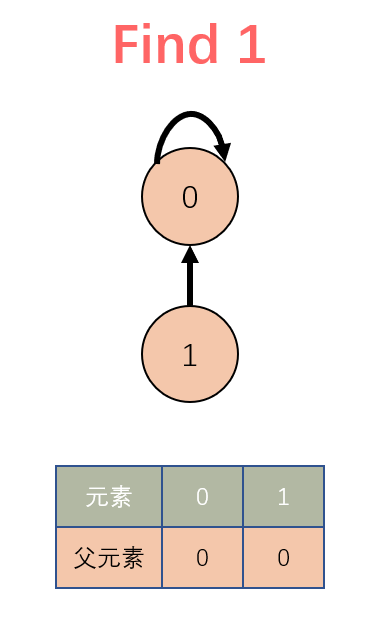
这种情况是没问题的,按照逻辑会把 1 的父节点指向 父节点的父节点,那 1 的父节点的为 0,0 的父节点也是 0,所以最终 1 的父节点还是指向了 0。经过路径压缩之后树的高度 h 会被优化到只有 2 个,那 find、union、isConnected 时间复杂度近乎为 O(1)。
实现
其实改动不大,就在 find 方法中增加一行赋值代码即可。
int find(int p) {
assert(p >= 0 && p < count);
while (p != parent[p]) {
// 当前查找的元素父元素与自己不相等
// 那么就把当前元素的 父元素的父元素 设置成当前元素的父元素。相当于原来的爹变成兄弟了,爷爷变成爹了。
parent[p] = parent[parent[p]];
p = parent[p];
}
return p;
}测试效率
void testQUPC(int n) {
srand(time(NULL));
QuickUnionPathCompression qupc = QuickUnionPathCompression(n);
time_t startTime = clock();
// 进行 n 次操作, 每次随机选择两个元素进行合并操作
for (int i = 0; i < n; i++) {
int a = rand() % n;
int b = rand() % n;
qupc.unionElements(a, b);
}
// 再进行n次操作, 每次随机选择两个元素, 查询他们是否同属一个集合
for (int i = 0; i < n; i++) {
int a = rand() % n;
int b = rand() % n;
qupc.isConnected(a, b);
}
time_t endTime = clock();
// 打印输出对这2n个操作的耗时
std::cout << "QUPC 2n: " << 2 * n << " ops: " << double(endTime - startTime) / CLOCKS_PER_SEC << "s" << std::endl;
}
int main() {
std::cout << "QuickUnionPathCompression START" << std::endl;
std::cout << "QuickUnionPathCompression 10000: ";
testQUPC(10000);
std::cout << "QuickUnionPathCompression 100000: ";
testQUPC(100000);
std::cout << "QuickUnionPathCompression 1000000: ";
testQUPC(1000000);
std::cout << "QuickUnionPathCompression END" << std::endl;
return 0;
}结果:
QuickUnionPathCompression START
QuickUnionPathCompression 10000: QUPC 2n: 20000 ops: 0.001s
QuickUnionPathCompression 100000: QUPC 2n: 200000 ops: 0.005s
QuickUnionPathCompression 1000000: QUPC 2n: 2000000 ops: 0.056s
QuickUnionPathCompression END递归完全压缩路径
说明

在上图的查找过程中,最终结果是如下:
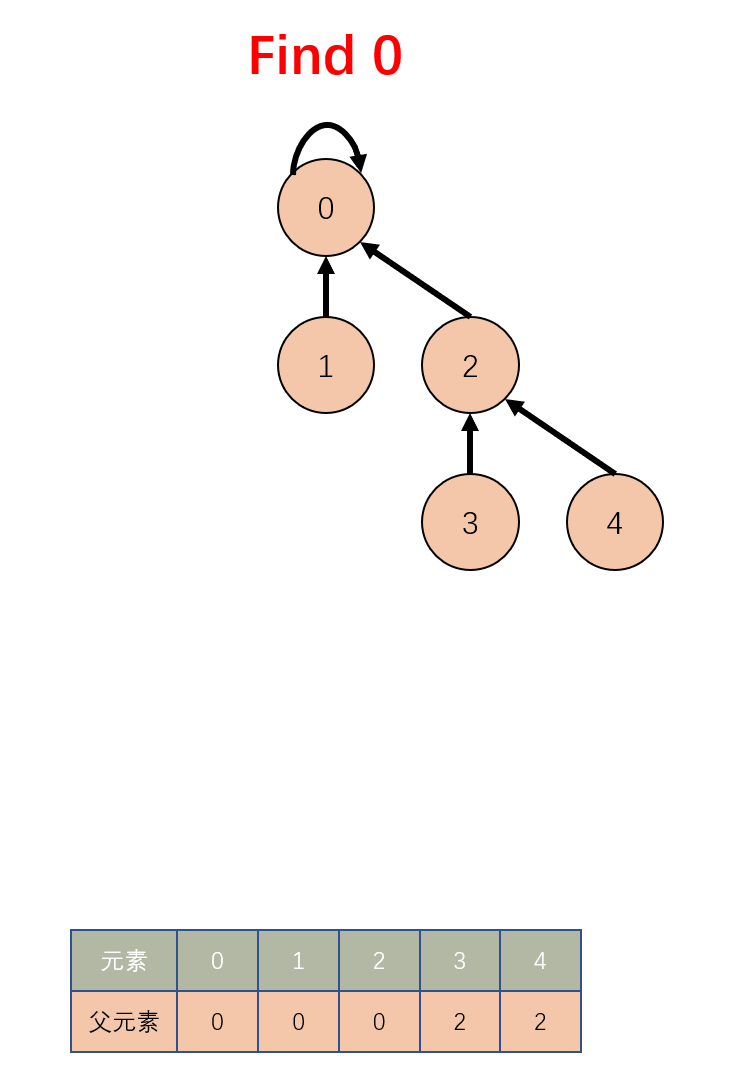
这一轮查询过后,经过路径压缩树的最高高度为 3。而最好的一种结果应该如下:
结果一次查找之后,能把路径全部压缩掉,让最大的高度为 2。那如何把下面这个结构通过一次查找完全压缩呢?
做一下推断
- find(4) = 0
- find(3) = 0
- find(2) = 0
- ...
只要是在这条树上的元素,无论开始查询哪一个点,开始点以及其上所有的父节点最终都会找到根节点,当前示例,也就是 0。那也就可以写成如下递归的方式:
- parent[4] = find(3); // find(3) = 0
- parent[3] = find(2); // find(2) = 0
- ...
实现
在 find 方法中,改写成递归的方式
int find(int p) {
assert(p >= 0 && p < count);
/*while (p != parent[p]) {
// 当前查找的元素父元素与自己不相等
// 那么就把当前元素的 父元素的父元素 设置成当前元素的父元素。相当于原来的爹变成兄弟了,爷爷变成爹了。
parent[p] = parent[parent[p]];
p = parent[p];
}*/
if (p != parent[p]) {
parent[p] = find(parent[p]);
}
return parent[p];
}注意:此方式与上一步的路径压缩在效率上并没有达到质变,甚至因为递归的原因可能还会更慢。
测试效率汇总
QuickFind START
QuickFind 10000: QF 2n: 20000 ops: 0.091s
QuickFind 100000: QF 2n: 200000 ops: 3.524s
QuickFind 1000000: QF 2n: 2000000 ops: 33.375s
QuickFind END
QuickUnion START
QuickUnion 10000: QU 2n: 20000 ops: 0.032s
QuickUnion 100000: QU 2n: 200000 ops: 4.067s
QuickUnion 1000000: QU 2n: 2000000 ops: 51.655s
QuickUnion END
QuickUnionSize START
QuickUnionSize 10000: QUS 2n: 20000 ops: 0s
QuickUnionSize 100000: QUS 2n: 200000 ops: 0.01s
QuickUnionSize 1000000: QUS 2n: 2000000 ops: 0.104s
QuickUnionSize END
QuickUnionRank START
QuickUnionRank 10000: QUR 2n: 20000 ops: 0s
QuickUnionRank 100000: QUR 2n: 200000 ops: 0.01s
QuickUnionRank 1000000: QUR 2n: 2000000 ops: 0.101s
QuickUnionRank END
QuickUnionPathCompression START
QuickUnionPathCompression 10000: QUPC 2n: 20000 ops: 0.001s
QuickUnionPathCompression 100000: QUPC 2n: 200000 ops: 0.005s
QuickUnionPathCompression 1000000: QUPC 2n: 2000000 ops: 0.056s
QuickUnionPathCompression END
文章评论